Hardware
机械臂、底盘、相机、夹爪和 IO 能力抽象。
Pitch 18 · Robotics Application Layer
如果 RobotMac 是机器人硬件底座,RobotAppLayer 就是让开发者像写软件一样构建机器人应用的稳定 SDK:上层写任务,底层处理 ROS、数据、训练、部署和运维。
01 · Platform Layer
ROS 2、LeRobot、SkillDock、EdgeFleet 和 Qualcomm edge runtime 都很重要,但上层应用开发者需要的是稳定能力接口,而不是底层集成细节。
机械臂、底盘、相机、夹爪和 IO 能力抽象。
保留 ROS 生态,不把 topic 细节暴露给每个应用。
技能安装、权限、版本、部署和回滚。
现场数据、失败片段和评估指标进入 DataFlywheel。
设备状态、日志、更新和多机运维。
模型最终运行在 Qualcomm edge runtime。
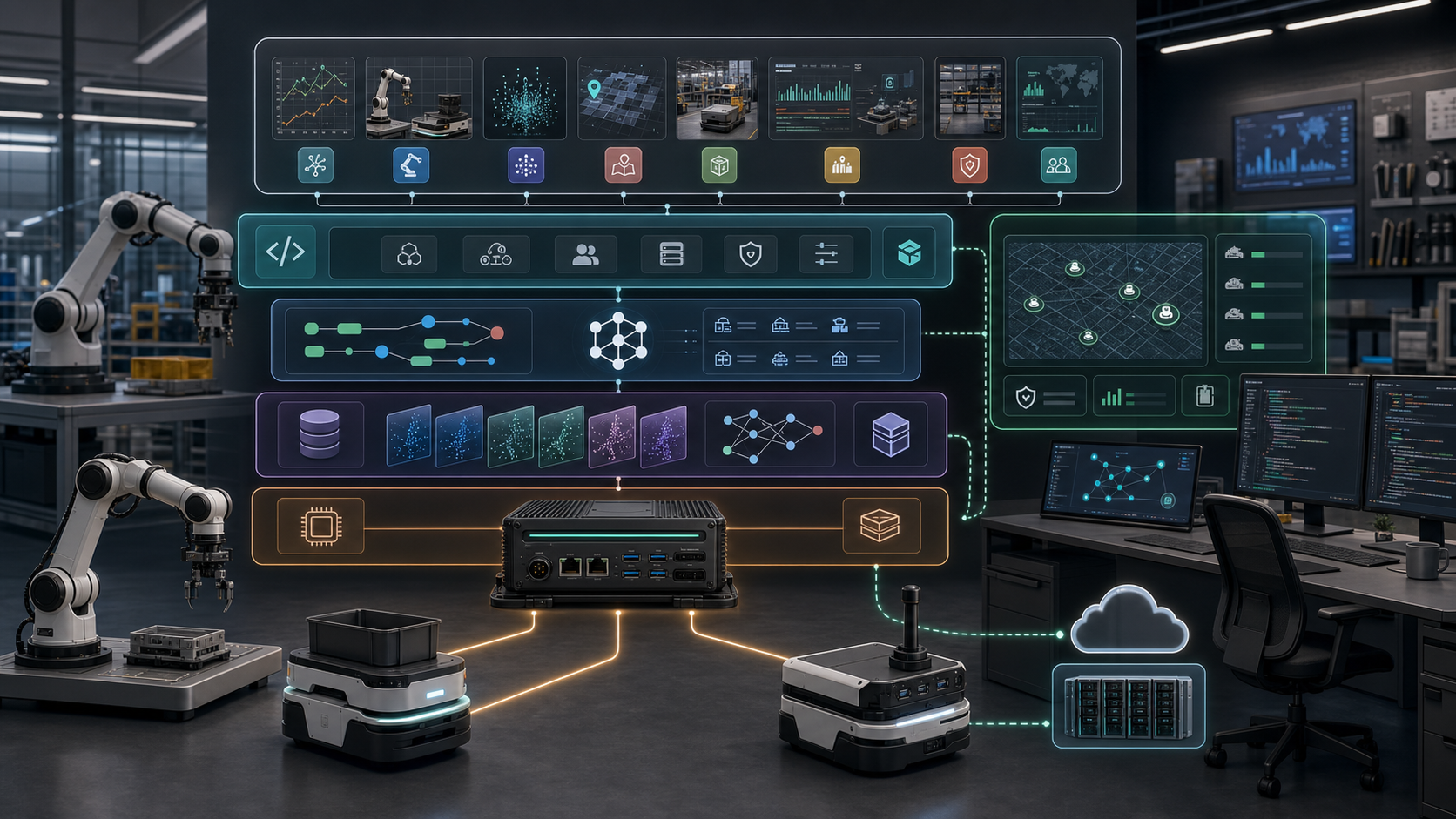
03 · Demo Story
比赛 demo 可以展示一个 LabForge 样品转移 app:上层调用 observe、grasp、train、deploy、monitor;中间层处理数据、技能、权限和日志;底层通过 ROS 2 与 Qualcomm edge runtime 执行。