Viam
验证硬件抽象、远程部署、数据和 OTA 痛点;RobotCoreOS 做它下方的本地镜像层。
Pitch 26 · Golden Robot Runtime Image
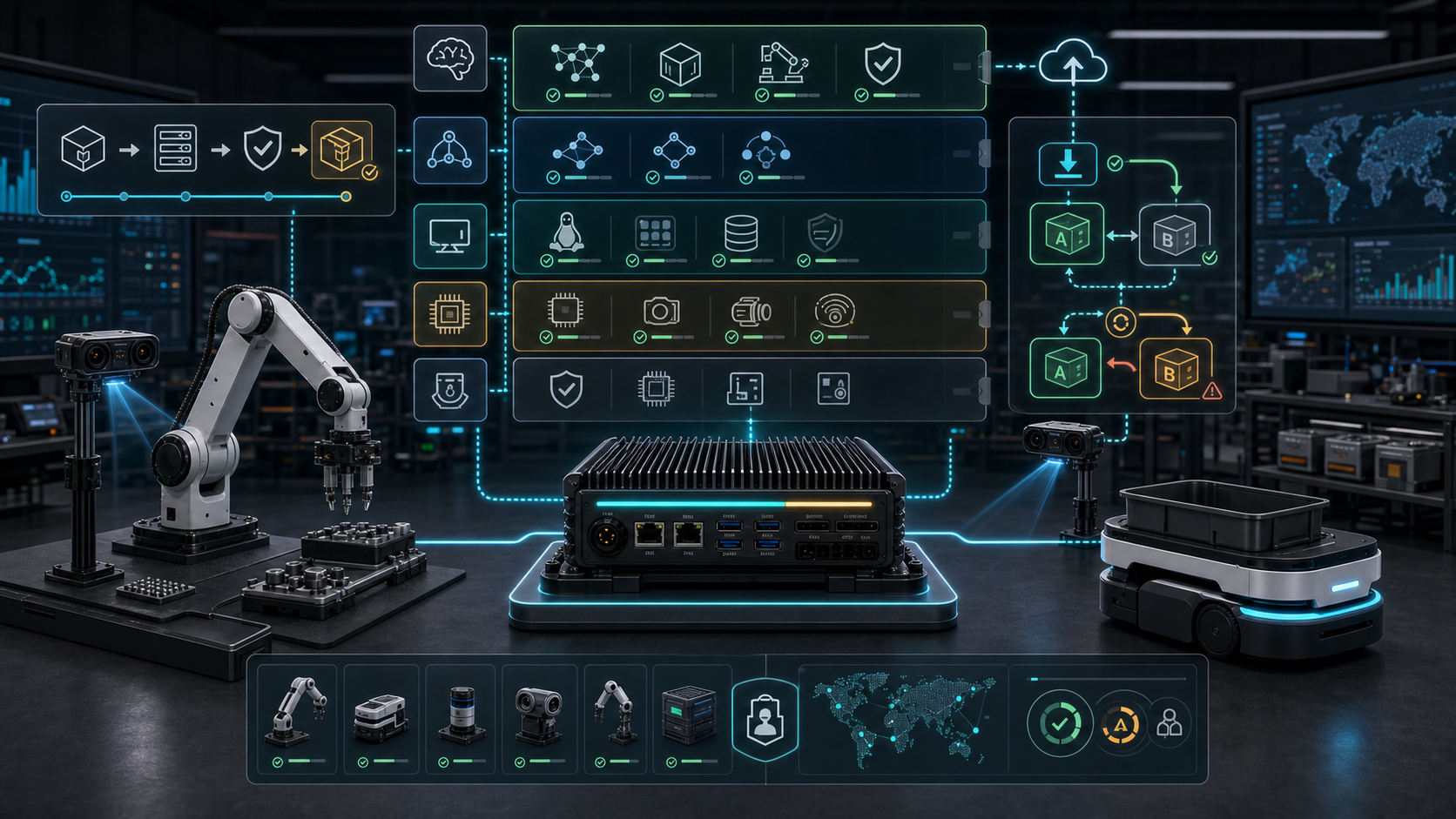
真正像电脑一样销售机器人,必须先有稳定系统镜像。RobotCoreOS 把驱动验证、ROS 2 bridge、LeRobot runtime、AI policy runner、SafetyOps、OTA、A/B 回滚和 fleet identity 做成 Qualcomm 机器人核心的默认运行底座。
01 · Runtime Stack
RobotCoreOS 把板级支持、机器人运行时、模型执行、安全服务、数据回流和远程运维压进一个 golden image。客户买到的是可启动、可验证、可更新的机器人底座。
启动、内核、驱动、相机、网络、IO 和加速器 profile。
ROS 2 bridge、设备发现、时间同步、动作接口和日志。
运行 CloudTwin 导出的策略包,记录延迟和失败事件。
记录 SoC、OS、QNN / QAIRT、模型、传感器和性能 profile。
设备身份、OTA、回滚、安全服务、客户归属和运维状态。
04 · OTA And Rollback
模型、技能、驱动和系统镜像都可能更新。RobotCoreOS 把 signed OTA、A/B rollback、recovery mode、staged rollout、SBOM 和审计日志做成默认机制,避免一次更新毁掉客户现场。